
|
For information on nuclear power industry products by Newton Labs, please contact us at:
sales@newtonlabs.com
Non-Contact Underwater Measurement and Robotic Operating Tools for the Nuclear Industry
Newton Labs has developed revolutionary, non-contact machine vision, laser scanning and robotic tools enabling nuclear plant operators to rapidly complete precise, in-vessel core validations of fuel assembly positions, as well as to accurately gauge the as-built dimensions and conditions of pipes, pumps, valves and structures in underwater radiation environments.
|
The NM200E Core Verification System is now sold and serviced by *This technology enabled Exelon Nuclear to wins
the Nuclear Energy Institute's 2012 Top Industry Practice (TIP) Award in the
Maintenance Category for
“PWR Fuel Alignment Mapping System.” |
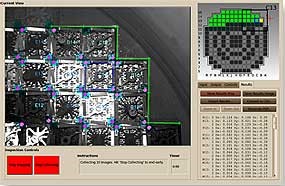
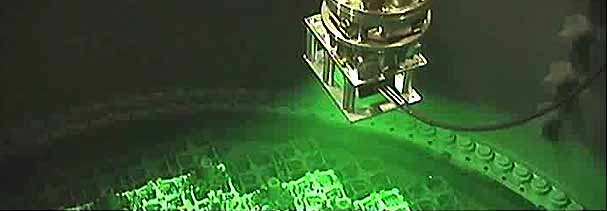
The Core Verification System is the primary application and interface used to perform a complete core mapping in approximately one hour or even less. |

NM200E fuel assembly |
|||
|
The NM200UW Nuclear Underwater Laser Scanner delivers precise, non-contact dimensional measurements in the underwater radiation environments found in BWR and PWR vessels and in the pools, or other underwater plant locations. The system combines rugged, industrial-grade hardware and electronics with sophisticated software to enable the generation of fully measurable CAD models from dense and accurate point clouds. *This technology enabled Exelon Nuclear to win
the Nuclear Energy Institute's 2012 Top Industry Practice (TIP) Award in the
Materials and Services Category for
“Laser Scanning within a BWR Vessel.” |
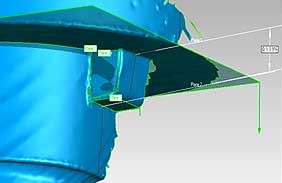
The dense point cloud from a scanned main wedge within a BWR annulus enabled the rendering of a precise, measurable CAD file. |

NM200UW Nuclear Underwater Laser Scanner |
|||
|
The NM200EVT-1 Nuclear Underwater Laser Scanner combines the underwater scanning CAD data of the NM200UW scanner with Color Enhanced Visual Inspection capabilities to meet MRP/ASME Section XI requirements. Along with MRP227 Visual Inspections the system combines industrial-grade radiation resistant hardware and electronics with Newton's sophisticated software to enable the generation of fully measurable CAD models from dense and accurate point clouds. *This technology enabled Exelon Nuclear to win
the Nuclear Energy Institute's 2012 Top Industry Practice (TIP) Award in the
Materials and Services Category for
“Laser Scanning within a BWR Vessel.” |

Scanning Reactor Internals enables the rendering of a precise, measurable CAD file along with MRP227 Enhanced Vision Inspection. |
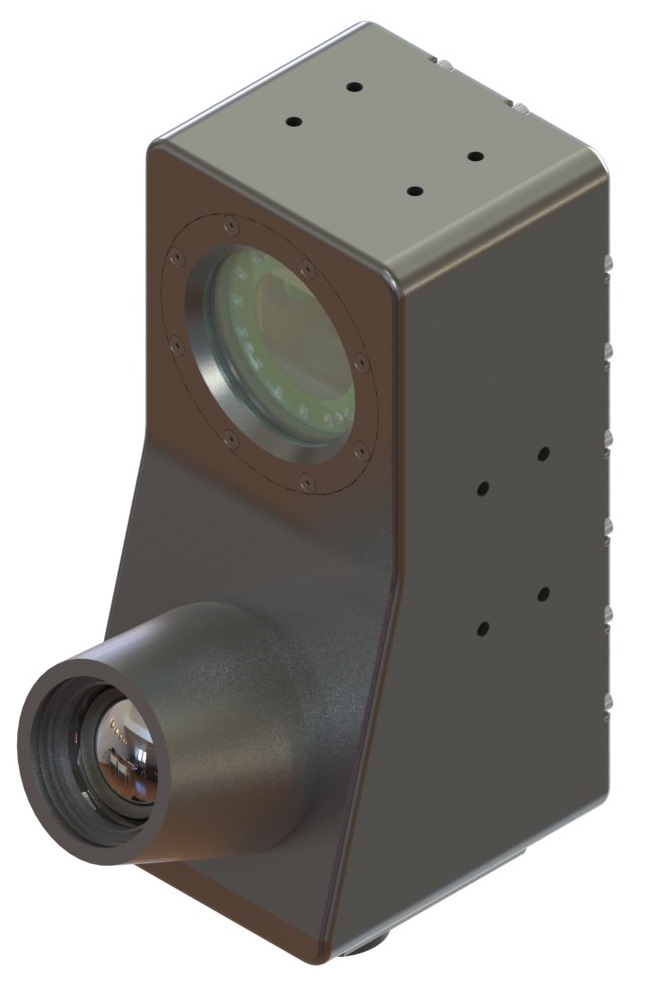
NM200UW Nuclear Underwater Laser Scanner |
|||
|
The NM260UW Nuclear Underwater Laser Scanner captures precise dimensional measurements in underwater radiation environments to provide precise, reliable and efficient dimensioning of as-built features, as well as to track cycle-to-cycle degradation in BWR and PWR vessels, cooling pools, or other underwater plant locations. The system as a demonstrated accuracy of 0.005" (0.127mm) or better and combines rugged, industrial-grade hardware and electronics with sophisticated software to enable the generation of fully measurable CAD models from dense and accurate point clouds. |
Non-contact measurements of PWR or BWR internals. |

NM260UW Nuclear Underwater Laser Scanner |
|||
|
The NM300UW Nuclear Underwater Laser Scanner delivers precise, non-contact dimensional measurements in the underwater radiation environments found in BWR and PWR vessels and in the pools, or other underwater plant locations. The system combines rugged, industrial-grade hardware and electronics with sophisticated software to enable the generation of fully measurable CAD models from dense and accurate point clouds. *This technology enabled Exelon Nuclear to win
the Nuclear Energy Institute's 2012 Top Industry Practice (TIP) Award in the
Materials and Services Category for
“Laser Scanning within a BWR Vessel.” |

The dense point cloud from a scanned main wedge within a BWR annulus enabled the rendering of a precise, measurable CAD file. |

NM300UW Nuclear Underwater Laser Scanner |
|||
|
Newton Labs Model SW1000 State of the Art Underwater Drone Platform for deployment of the NM200EVT-1 Laser Scanner to perform MRP227 and ASME Section X1 inspections. Advanced Newton developed position holding software, similar to the software used on air drones, controls thrusters for exact placement and stability to perform the most critical EVT-1 inspections and laser scan measurements. Newton's SW1000 Underwater Drone can be pre-programed to inspect over 90% of MRP-227 and ASME Section XI required inspections and physical measurement thus removing a significant load from the drone operator. *This technology enabled Exelon Nuclear to win
the Nuclear Energy Institute's 2012 Top Industry Practice (TIP) Award in the
Materials and Services Category for
“Laser Scanning within a BWR Vessel.” |
Newton's SW1000 Underwater Drone can deliver the NM200EVT-1 to scan structures and is programmable. |
NM200UW Nuclear Underwater Laser Scanner |
|||
|
The QUAD400UW Fuel Bundle Inspection System is deployed in the spent fuel pool to measure and detect bowing, twisting, and finer defects in spent fuel. Fuel assemblies can be scanned and measured in less than 40 seconds and result in instant CAD models to allow for immediate disposition decisions. |
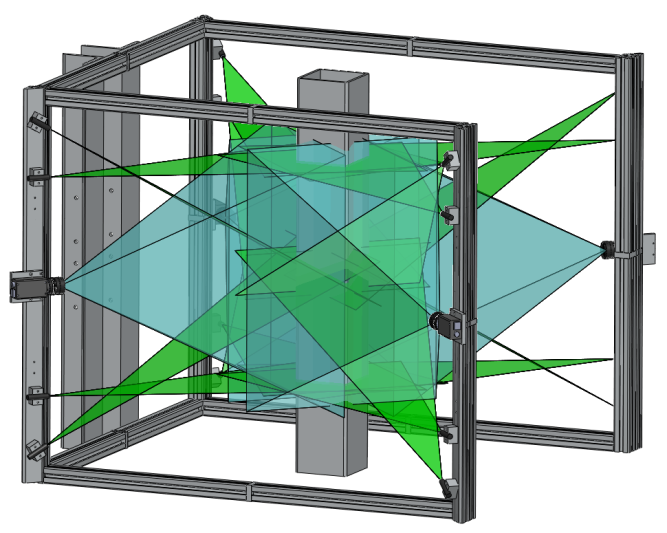
All four sides of the fuel bundle are scanned to detect bowing or twisting and other defects |

QUAD400UW |
|||
|
The Inspector Underwater In-Tank Robot is a highly maneuverable, semi-autonomous robotic platform that enables plant owners to meet the requirements of the Nuclear Energy Institute for tank inspection in accordance with NEI 09-14. An Inspector system has the ability to deploy a variety of advanced nondestructive evaluation (NDE) sensors over 90% of a tank floor and to map the position of any indications with an accuracy of 1/8th inch (3 mm). Surveys can be performed with the tank full or dry. An Inspector system is composed of the robot, an in-tank, hatch-mounted global positioning camera assembly and the operator's console. |

A vertically indexed arm mounted on the robot is shown fitted with an ultrasonic probe unit. A second, adjacent arm is seen in the fully raised position. |

Inspector Underwater |
|||
|
The Surveyor Robot is a highly flexible and fully autonomous or semi-autonomous robotic platform that allows utilities to inspect or perform operations in nuclear facilities. The robot has built in high resolution pictures and laser scanners. The Surveyor robot can also carry various arms and can integrate the data from many other different sensors including ultrasound, eddy current, ACFM and other sensors. The Surveyor can be equipped with wheels, Mecanum wheels, tracks and propeller pods or various combinations of motive options to provide required mobility. Surveyor operates in air or underwater. |

The Surveyor can function fully autonomously or under operator control. |
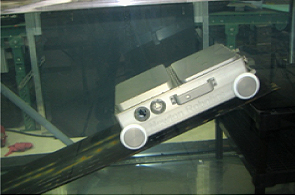
The Surveyor operating Underwater |
|||

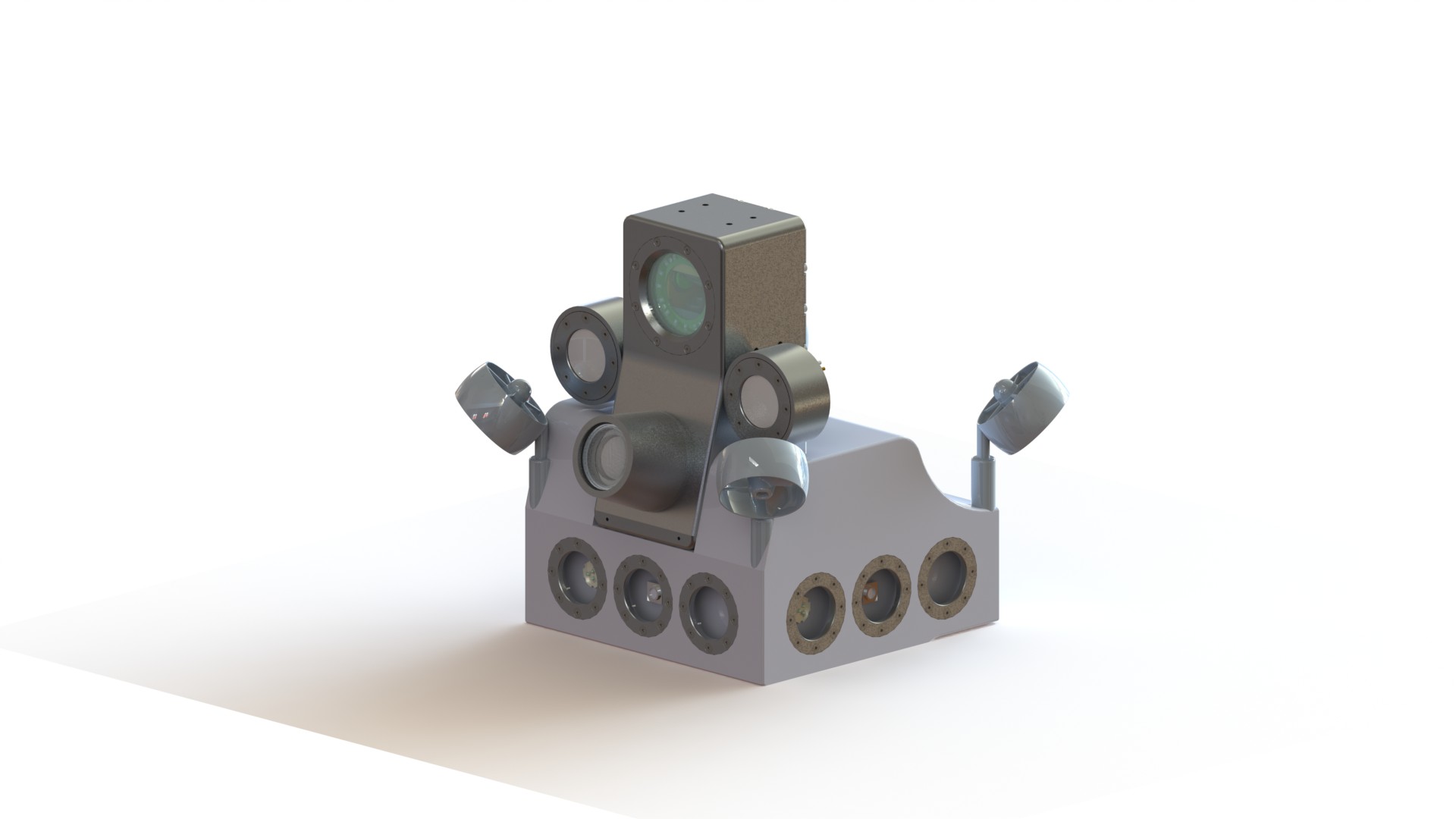
The Reactor Pressure Vessel Inspection Robot is a reactor barrel measurement tool. The Newton RPV Inspection Tool measures the condition of the reactor barrel with various sensors and produces significant data including CAD models of the reactor barrel and the lower internals. It also measures ovality of the reactor barrel as well as surface condition. The Newton RPV tool can be equipped with Laser Scanners, Phased Array Ultrasound, Eddy Current and ACFM sensors. |

A vertically indexed arm mounted on the robot is shown fitted with a senor head containing underwater laser scanners and ultrasonic probes to perform full barrel examinations. |

The RPV Sensor Head |
|||
|
And with Keith Moser 
|
|||||