
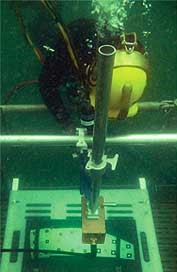
M210UW & M310UW Dual Usage Laser Scanner Operations
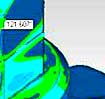
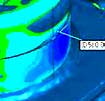
Observe, identify and quantify current underwater conditions
including
rust, wear, fissures and
corrosion of components
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
Both the M210UW and M310UW underwater laser scanners operate by optical triangulation. The projected laser line sweeps the target surface and the high-resolution camera, centered on the target, captures any deformation of the line and sends the information to the control console where the Newton-developed algorithms create and record a point cloud, enabling precise, post-session dimensioning using industry standard three-dimensional software. Although specifically designed for use in fresh or salt water, these versatile scanners can also operate in air.
- The M210UW and the M310 are dual usage scanners. They may be deployed using a cable from the surface or mounted on an ROV/AUV; powered and communicated through a MUX. Both the M210UW and the M310UW are full area scanners using high resolution internal data. They also can be used with IMU data, both with their internal scanning or with fixed laser line and IMU data for large area scanning.
- The M2100UW is able to scan a target as close as 6 in. (150mm) and out to a distance of 3 ft. (0.9M) for a scan coverage area of 2.1 ft. x 2.9 ft. (64 cm x 88 cm). The M210UW system measures underwater targets up to an accuracy of +/-.0004 (0.01mm) (after processing with third-party, 3D software**)
- The M310UW is able to scan as close as 1.5 ft. (0.46 m) and out to a distance of 10 ft. (3 m), where its field of view is an area nine feet by seven feet (2.80 m by 2.08 m). The M300UW system measures underwater targets up to an accuracy of +/-.001 in. (0.025 mm) (after processing with third-party, 3D software**)
- Both scanners are designed to scan and capture much larger target areas by combining several point clouds together to form larger composites.
- Operators may select from several levels of scan quality via the user interface. The shortest, most coarse scan takes 15 seconds, while the longest and most detailed takes approximately three minutes.
- Laser light color is maximized for water penetration. The specific wavelength of the laser allows for highest possible efficiency underwater transmission.
- The scanner camera only accepts the specific color produced by its own laser and LED lights, greatly reducing any contamination from stray light in the scanning environment; thus making both models relatively immune from any other underwater work lights during operation.
- In the visual observation mode, the LED ring array on the head illuminates the area and the camera transmits a monochrome image to the control console screen to assist the operator for optimum positioning and on-site analysis.
- The control console powers and communicates with the scanner through the cable via low-voltage DC power and signals, and the camera sends scan results up via Gigabit Ethernet.
- All data is permanently stored for later analysis and study via in-console solid state drive and/or transferred by USB to a flash drive.
**All M210UW and M310UW accuracy is related to the field of view, distance from the object to be measured and can vary by the parameters of the object. Data accuracy when used with IMU data depends on the update rate of the IMU and the speed of travel. Consult Newton for the specific accuracy that can be obtained for your proposed object.
