
Surveyor Amphibious Surface Inspection and Load Delivery Robot
Laser & video scanning of surfaces in multiple environments
Heavy Duty Load Delivery Capability

The Surveyor, designed and manufactured by Newton Labs, is an amphibious, wireless, wheeled inspection robot specifically developed for scanning surfaces underwater and deliverying loads, as well as providing similar and expanded functionality on land.
The outstanding capabilities of the Surveyor series include:
- Downward looking 3D laser scanner
- 270° peripheral video image capture
- A laser range finder for obstacle avoidance
- Flat top for Load mounting
- Heavy Load carrying capability
- Can be equipped with propeller pods for full swimming ability
- On board data logging
- Wireless communications (in air)
- Standard wheels, tracks or Mecanum wheels
- A magnetic traction system to allow navigation in any orientation (including inverted when underwater on steel surfaces)
Deployment Example
The Surveyor design has proven to be a capable multipurpose platform
and may be modified to achieve specific tasks both above and below
the water.
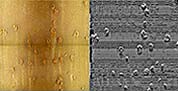
For example: a Surveyor was successfully deployed
to survey several bays in the torus of a boiling water reactor (BWR)
at the Peach Bottom Atomic Power Station near Delta, PA. The Surveyor
returned 3D data and images that exceeded the customers' expectations
and provided valuable insight into the condition of the zinc lining
of the torus, as well as the underlying steel structure. Data revealed
the integrity of the coatings as well as any debris, corrosion products,
past repairs, and any unexpected features that could have affected
planned work during the next cycle.
Surveyor Options
Specialized sensors, environmental mapping and robotic arms are some of the options that are available upon request.