Precise Navigation of the Inspector Robot
Multiple inputs combine to deliver highly accurate positioning.
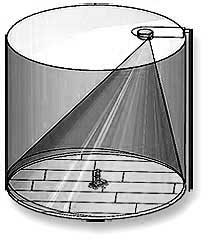 |
Once the robot is deployed through the tank top hatch, the global positioning camera assembly is clamped to the hatch rim. The global positioning camera tracks the location and position of the robot's mast-top LED lights. In addition, the robot has on-board horizontal laser rangefinders on four sides that measure the distance to the tank wall, with a range of approximately six feet. |
 |
The robot communicates through a power / data
umbilical cable. The robot is capable of operating semi-autonomously,
or under direct operator control. Search patterns, based upon tank sizes,
footprints and internal floor structures, are pre-programmed into the
system. |
 |
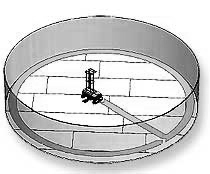
The robot detects and maps where the cross-tank floor plate welds meet the wall. Upon completing the perimeter sweep, the robot follows each long welded joint and detects the short, intersecting welds. This enables the system software to map the location of the individual floor plates as well as any obstructions such as piping or structural supports. |
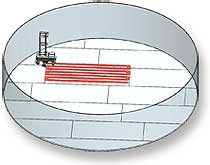 |
After identifying all floor plates, the robot is directed to scan the area of individual plates with the attached sensor package, using a "lawn-mowing" pattern to insure complete coverage. |
|
|
|
|
|
|
The Inspector is precisely positioned within a tank using
a combination of inputs: the vertical video view from the global positioning camera
at the top of the tank, as well as the forward, rearward, lateral and down-looking
views from five on-board cameras and four laser range finders.
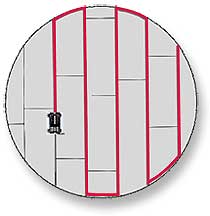
The information from these sources, in addition to direction,
speed and position inputs from sensors in the drive motors and wheel pods,
is processed by the software to create a virtual tank floor environment and
robot avatar.The operator can visually track and when necessary, control the robot with keyboard commands in the virtual environment using the avatar. The user interface numerically displays the precise XY-axis location of the robot. The
virtual blue line represents the path the robot has traveled on the
tank floor.
![]()